労働者の重量物の運搬は腰へ大きな負担になり,腰痛の主な原因と考えられています.そのため,労働者の作業中の負荷軽減を目的として,パワードスーツを開発しています.
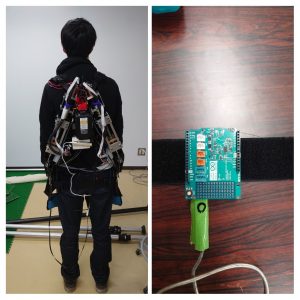
Figure 1に開発したパワードスーツ(左)と姿勢推定に用いるセンサ(右)を示しました.センサには9軸慣性センサを使用しており,使用者の胸の位置に取り付けます.センサから得られる角度と加速度を用いて姿勢推定を行い,持ち上げ開始時を予測しパワードスーツを制御します.
持ち上げ時の動作検証では,パワードスーツのアシスト効果を,腰部と外側広筋の筋電位の平均を比較することで確認することができました.
現在は,センサの個数を増やすことで,より正確な動作認識と歩行など様々な動作のサポートに対応させることを目的としています.
Publication
- Power Assist Control Based on Human Motion Estimation Using Motion Sensors for Powered Exoskeleton without Binding Legs, Shinnosuke Nomura, Yasutake Takahashi, Katsuya Sahashi, Shota Murai, Masayuki Kawai, Yoshiaki Taniai, and Tomohide Naniwa, Applied Sciences, Vol. 9, No. 1, Article Number 164, 2019, https://www.mdpi.com/2076-3417/9/1/164, https://doi.org/10.3390/app9010164
- 装着者とパワードスーツの相互作用力を用いた追従動作と線形予測による姿勢角推定に基づくアシスト制御,村井翔太,石塚雄大,高橋泰岳,ロボティクス・メカトロニクス講演会2019,2A2-L01, 2019.06.08
- 胴体運動に基づく下肢パワードスーツの制御,橋本修一路,高橋泰岳,ロボティクス・メカトロニクス講演会2019,2A2-L02, 2019.06.08
- Modeling Walking Behavior of Powered Exoskeleton Based on Complex-Valued Neural Network, Yudai Ishizuka, Shota Murai, Yasutake Takahashi, Masayuki Kawai, Yoshiaki Taniai, Tomohide Naniwa, Proceedings of 2018 IEEE International Conference on Systems, Man, and Cybernetics, pp. 1923-1928, 2018.10
- Walking Motion Model based on Quaternion-valued Recurrent Neural Network for Powered Exoskeleton, Fumihito Murata and Yasutake TAKAHASHI, Intelligent Systems Workshop 2018 (ISWS 2018), pp. 1354-1359 2018.12.08
- Power Assist Control Based on Learning Database of Joint Angle of Powered Exoskeleton Suitable for Wearer’s Posture, Katsuya Sahashi, Shota Murai, and Yasutake TAKAHASHI, 12th International Conference, UAHCI 2018, Held as Part of HCI International 2018, Las Vegas, NV, USA, July 15–20, 2018, Proceedings, Part II, LNCS 10908, pp. 340 – 346, Springer, 2018.07
- 胴体の動きに基づく下肢パワードスーツの制御,橋本 修一路,高橋 泰岳,日本知能情報ファジィ学会 合同シンポジウム2018 第27回 北信越支部シンポジウム & 第25回 人間共生システム研究会,pp.36-37,2018.11.18
- 複素ニューラルネットワークによるパワードスーツ歩行動作のモデル化, 石塚雄大, 村井翔太, 佐橋克弥, 高橋泰岳, 日本知能情報ファジィ学会 合同シンポジウム2017 第26回 北信越支部シンポジウム & 第23回 人間共生システム研究会 講演論文集, pp.39-40, 2017.12.10
- 膝を拘束しないパワードスーツと装着者の足の間に働く力情報を用いた状態推定に基づくアシスト制御,村井翔太,佐橋克弥,野村慎之介,高橋泰岳,川井昌之,ロボティクス・メカトロニクス講演会2017講演論文集, 2P1-I02, 2017.05
- モーションセンサを用いた動作予測に基づく膝を拘束しないパワードスーツの学習制御,野村慎之介,佐橋克弥,村井翔太,高橋泰岳,川井昌之,ロボティクス・メカトロニクス講演会2017講演論文集,2P1-I03, 2017
- Evaluation of Power-Assist System by Computer Simulation, Yoshiaki Taniai, Tomohide Naniwa, Yasutake Takahashi, and Masayuki Kawai, Journal of Advanced Computational Intelligence and Intelligent Informatics, Vol.20, No.3, pp.477-483, 2016.5 doi: 10.20965/jaciii.2016.p0477
- Power Assist Control based on Motion Estimation of Wearer’s Forearm using Motion Sensor, Katsuya Sahashi, Shinnosuke Nomura, Takuya Inoue, Yasutake Takahashi, Yoshiaki Taniai, and Masayuki Kawai, Proceedings of 2016 Joint 8th International Conference on Soft Computing and Intelligent Systems and 2016 17th International Symposium on Advanced Intelligent Systems, pp.649-654, DOI 10.1109/SCIS&ISIS.2016.177
- 装着者の足とパワーアシストスーツ間に働く力とヤコビアンを用いた運動推定に基づくアシスト制御, 村井 翔太,佐橋 克弥,野村 慎之介,高橋 泰岳,川井 昌之, 日本知能情報ファジィ学会 合同シンポジウム 2016 第25回北信越支部シンポジウム & 第21回人間共生システム研究会, 発表番号17, pp.66-67, 2016.11
- 中足趾節関節で接地するパワーアシストスーツの足部機構の開発,水崎俊洋,吉村健男,川井昌之,高橋泰岳,ロボティクス・メカトロニクス講演会2016, 2A1-14b1, 2016.6
- モーションセンサを用いた動作予測に基づく膝を拘束しないパワーアシストスーツの制御,野村慎之介,井上卓也,高橋泰岳,川井昌之,谷合由章,ロボティクス・メカトロニクス講演会2016, 2A1-15a5, 2016.6
- モーションセンサによる装着者の前腕の運動推定を用いたパワーアシスト制御,佐橋克弥,野村慎之介,高橋泰岳,谷合由章,川井昌之,ロボティクス・メカトロニクス講演会2016, 2A2-15a3, 2016.6
- モーションセンサを用いたアシスト制御,佐橋 克弥,野村 慎之介,井上 卓也,高橋 泰岳,谷合 由章,川井 昌之,第31回ファジィシステムシンポジウム講演論文集,TA3-1,pp.340-343,2015.09