近年,少子高齢化により要介護高齢者に対する介護士の人手不足が深刻化しています.そこで,介護士に代わりロボットが介護業務の一部を担うシステムの開発が広く行われています.本研究室では,認知症高齢者とロボットのコミュニケーションを主軸としたインタラクションシステムの開発を行っています.

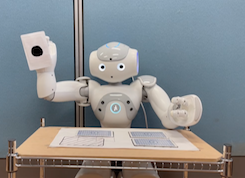
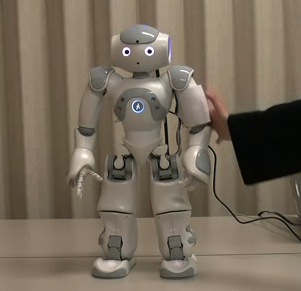
人型ロボットNAOを用いて飲水を促すインタラクションシステム,最近の出来事や昔の思い出について話しかける自律型コミュニケーションシステム,積木を使ったレクリエーションシステムの開発を行っています.

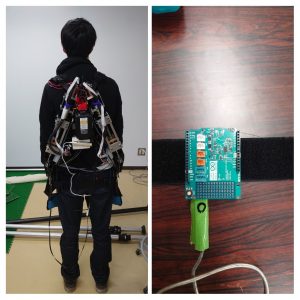
ロボットがコミュニケーションを自律的に行うためには,対話者である人間の言葉や表情,動作を正しく認識し,意図を読み取る必要があります.本研究では言葉の認識に音声認識を用いており,表情と動作を認識するためにフェイススケール計測システムと姿勢認識システムをそれぞれ開発しています.
対話者の意図とそれまでの対話の時系列を考慮し,ロボットが次の発話や動作を自律的に選択するシステムを開発しました.人との対話を通して,ロボットは適切な発話や動作を学習し,少しずつ対話をマスターしていきます.
また,発達障害の疑いがある子供を対象に,自律型コミュニケーションシステムを用いてインタラクション実験を行い,彼らのソーシャルスキルに与える影響を調査しています.
Publication
- 人型ロボットを用いた認知症高齢者とのコミュニケーションシステムの開発,吉田拓海,高橋泰岳,高久範江,日本知能情報ファジィ学会合同シンポジウム2019第28回北信越シンポジウム&第27回人間共生システム研究会講演論文集,pp.3-4,2019.
- 認知症高齢者ケアのための人型ロボットを用いたコミュニケーションシステムの開発,吉田 拓海,高橋 泰岳,高久 範江,P-24,HAIシンポジウム2020.
- 会話中の空白におけるロボットの応答が人に与える影響, 吉田 拓海,高橋 泰岳,築地原 里樹,第36回 ファジィ システム シンポジウム (FSS2020),MA1-3,pp.13-16,2020.