
本研究では,身体を自由に動かすことが困難な人でも意思や感情を伝えられるように,視線のみで操作可能なコミュニケーションロボットの開発を行っています.ユーザーはPC画面上のインターフェースを注視することで,ロボットの移動や感情表現を選択することができます.また,ロボットのカメラ映像を用いて遠隔から周囲の状況を把握しながら操作可能な構成となっています.
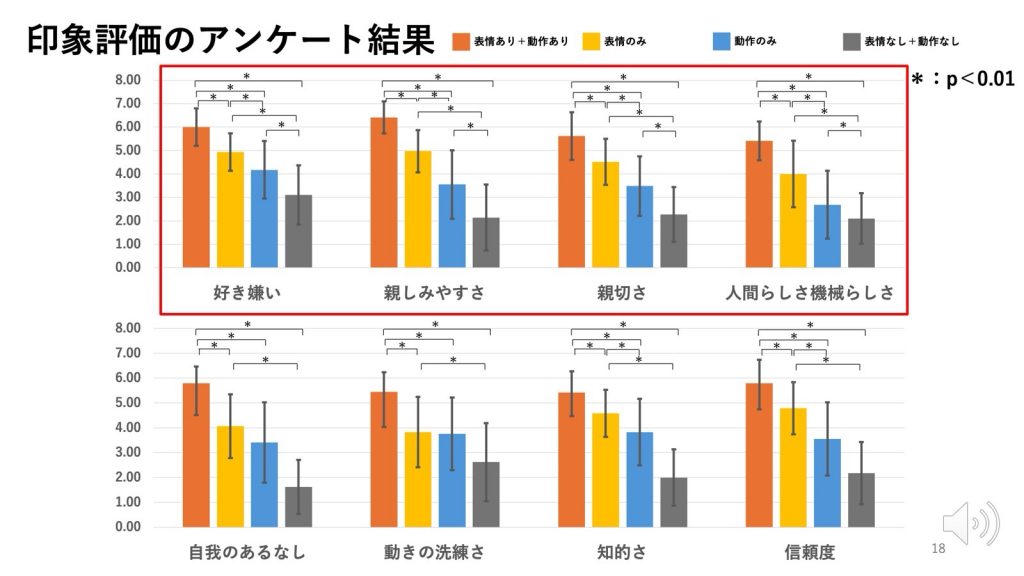
視線入力の誤操作を抑えるため,視線データの平滑化や瞬きの除去を行い,ポインタの安定性向上と誤操作の減少を確認しました.また,ロボットに感情表現や動きを付与した場合と付与しない場合で印象評価実験を行った結果,表情や動きを伴うロボットの方が親しみやすさや好印象が向上する傾向が見られました.
現在は会話支援機能の開発に取り組んでいます.ロボット「まるット」のカメラ映像から YOLOv5 によりキーワードを検出し,それを基に ChatGPT のような大規模言語モデルが複数の発話候補を生成します.ユーザは視線で発話内容を選択し,ロボットが代弁することで会話を行います.今後は,対話の流れに応じた候補生成を行い,より自然で円滑なコミュニケーションの実現を目指します.
Publication
- 遠隔操作ロボット「まるット」の視線操作インターフェース、松下 稜,高橋 泰岳,春名 正樹,築地原 里樹、第41回 ファジィ システム シンポジウム/FSS2025、1A2-1、2025