発達障害の一つである発達性ディスレクシア(DD)は,知的な遅れや視聴覚障がいがないにも関わらず読字・書字能力を獲得することに困難さがある.このような児童が定型発達児と同様に教科学習を行うための研究の一環として,当研究室ではDDの特性のためにタイピング練習に困難さを覚える児童のために,キーボードのキートップのアルファベットを色に置き換え,ローマ字を意識せずにタイピングの練習をできるタッチタイピング練習支援アプリを開発した.
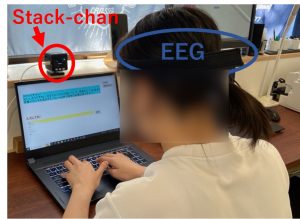
本研究では,上述のタイピングアプリを用いたタイピング練習を行った児童に対してWAVES検査を行い,視知覚速度指数(VPSI)の値とタイピング時の視線計測データとの関連性を調査した.また,本タイピングアプリを用いて練習を行なった場合でもタッチタイピングの習得が困難な児童の特性として,お題を見る割合が低かったことから,アプリのお題の表示を大きく変更したものを使用し視線計測実験を行い,有効性を調査した.


VPSIの値とクリア時間・お題を見ていた割合との相関関係より,どちらの数値においても値が高い児童の方がタイピングの流暢性が高く,タイピング時にお題を見る傾向にあることがわかった.お題表示を大きく変更したタイピングアプリを使用した場合でも,VPSIの値が低い児童のお題を見る割合の向上には繋がらなかった.
今後の展望として,タッチタイピングの習得が難しい児童がタッチタイピングの練習を行えるようにお題を見る割合を上げる方法を模索することが挙げられる.