近年,人との交流を目的としたコミュニケーションロボットが開発されています.人間のコミュニケーションのひとつに,握手やハグなどの体を使うインタラクションがありますが,現在のコミュニケーションロボットには触覚センサがあまり搭載されていないため,ロボットとのタッチインタラクションは難しく,それが人間にどのような効果をもたらすか不明な点が多いです.
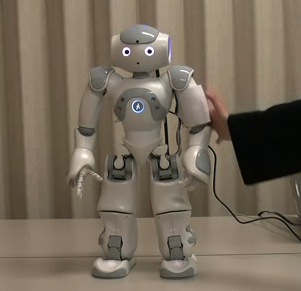
そこで,本研究では人型コミュニケーションロボットNAOに触覚センサを搭載し,人からのタッチに反応するロボットの振る舞いが人間に及ぼす影響について調べています.

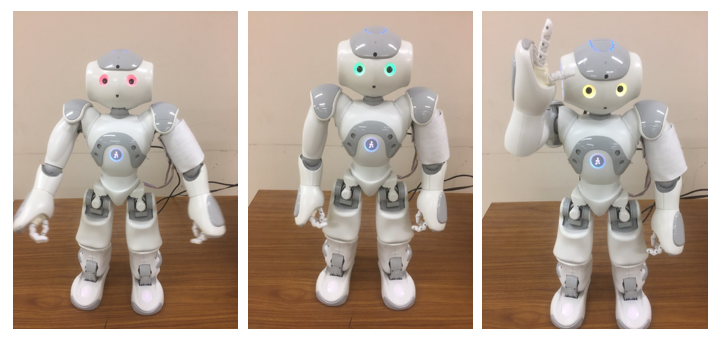
人とNAOとのタッチインタラクションの実験結果から,NAOが反応すると人はNAOに対して「可愛い」「また会いたい」などのポジティブな印象を抱き,反対にNAOが反応しなかった場合は「冷淡だ」「思いやりがない」などネガティブな印象を抱くことが分かっています.
今後はより人からのタッチのパターンを増やし,様々な反応行動を見せるロボットとのインタラクションがどのような影響をもたらすかを調べます.
Publication
- 奥田真理子,高橋泰岳,”人との接触状態判定システムを用いた人型ロボットの反応生成とそれに対する人への影響評価”,日本知能情報ファジィ学会合同シンポジウム2019 第28回北信越シンポジウム&第27回人間共生システム研究会,pp5-6,2019.
- Mariko Okuda,Yasutake Takahashi,Satoki Tsuichihara,”Effect of Humanoid Robot’s Reaction on HumanTouch to Robot”,Proceedings of Joint 11th International Conference on Soft Computing and Intelligent Systems and 21st International Symposium on Advanced Intelligent Systems (SCIS-ISIS),pp1-6,2020.