工場内移動には階段昇降が伴うため,人間・ロボットともに負担の少ない動作が求められます.しかし手先押し力を用いた階段昇り動作や関節負担に関する研究は少なく,ヒューマノイドロボットへの応用も進んでいません.そこで本研究では,手先の押し力を発揮するヒューマノイドロボットの開発を目指し,手先を推進力として活用した階段昇段動作の解析を行っています.
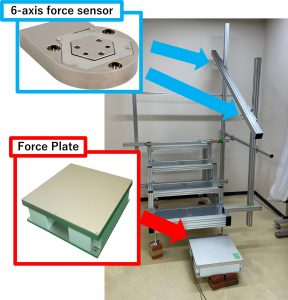
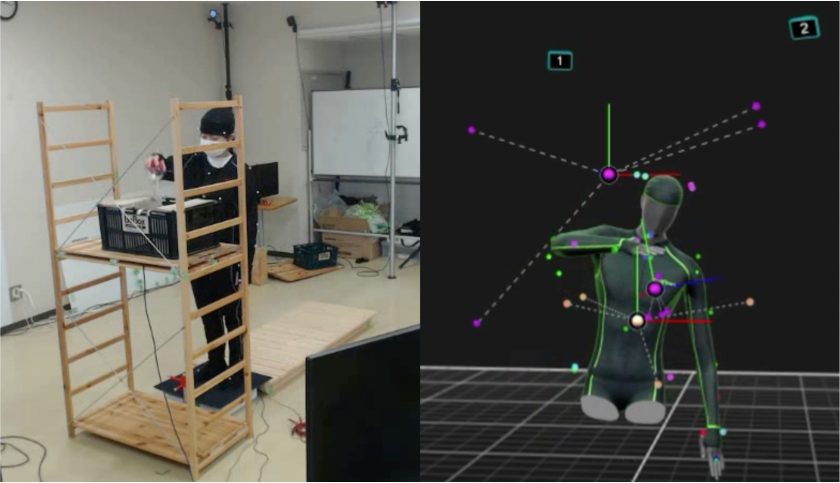
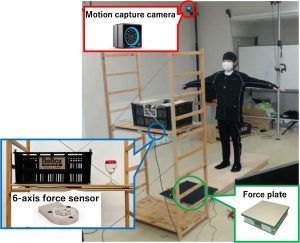
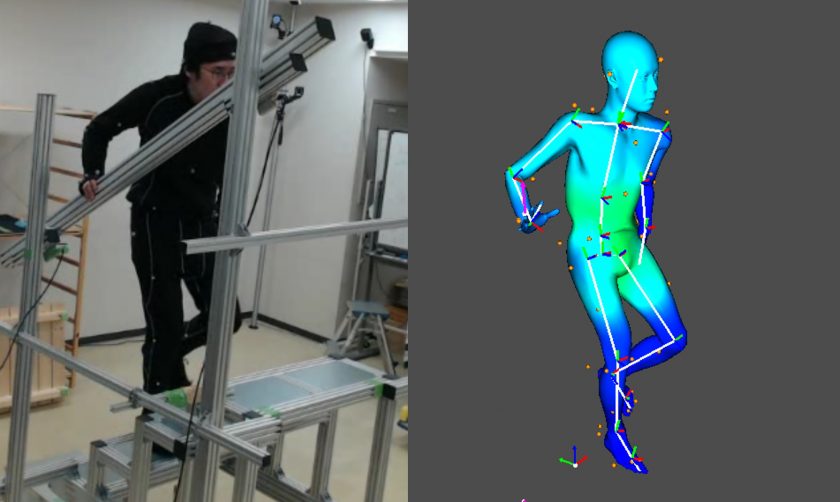
手摺有り・無しの階段昇段動作を対象として解析しました.被験者に手先押し力を自然に活用させる為,5分程度の階段昇降運動を実施し疲労させた後,計測を行います.身動作の計測には光学式モーションキャプチャを使用し,手先押し力の取得に6軸力覚センサ,一段目での床反力の取得にはフォースプレートを用いました(Fig. 1).
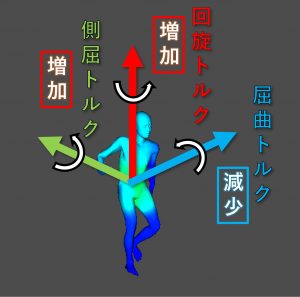
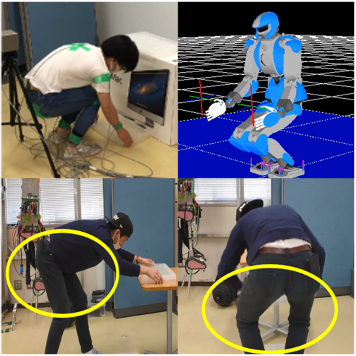
計測したデータから腰椎屈曲角度や関節トルクを解析した結果,手摺に対して力を発揮することで各関節トルクは増加しますが,それによって腰前屈負荷を減少させていることが示唆されました(Fig. 2).
今後は被験者を増やし,他ステップにも目を向け,階層的クラスタリングを用いて個人差を考慮した解析を行っていきます.