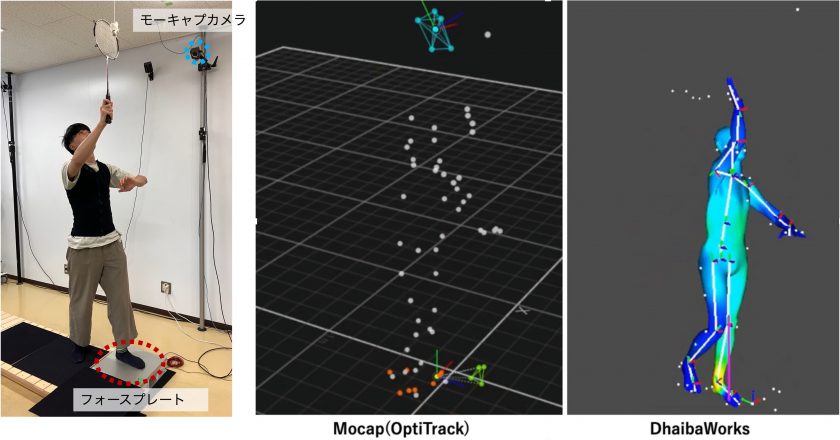
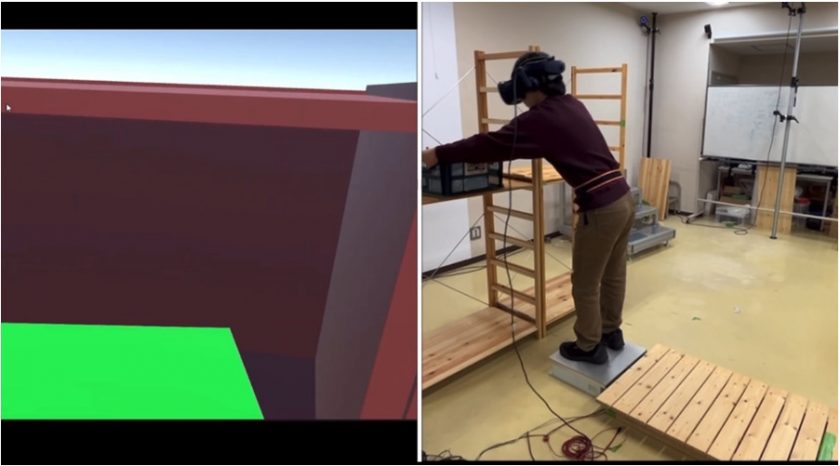
VRの発達によりVR機器を介して運動や体験をすることで能力を向上させるトレーニングシステムの研究が様々な分野で行われています.本研究では,VR空間でのバドミントンにおける,外的遠焦点,外的近焦点,内的焦点の注意の焦点に基づくフィードバックシステムの開発し,ハイクリア動作の向上を目的とし比較しました.
実験では,VR空間でフォームフィードバックシステムを用いたVRバドミントン訓練を行い,VR空間における外的遠焦点,外的近焦点,内的焦点の影響の比較検証実験を行いました.
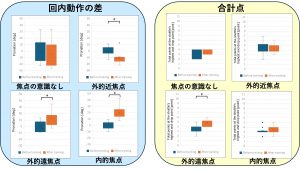
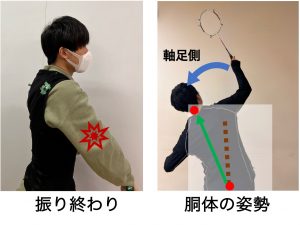
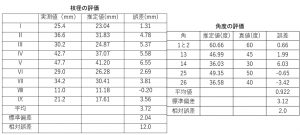
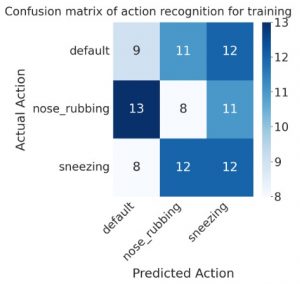
回内動作の差は内的焦点と外的遠焦点が優位に向上したことが確認でき,シャトルの軌道では,外的遠焦点で有意差が確認できました.そのため,外的遠焦点が訓練による影響が最も大きいことが確認できました(Fig. 2) .
今後は,経験者を対象とた訓練により,どの焦点の訓練が最も影響を与えるのかを検証し,初心者との比較を行うことが考えられます.