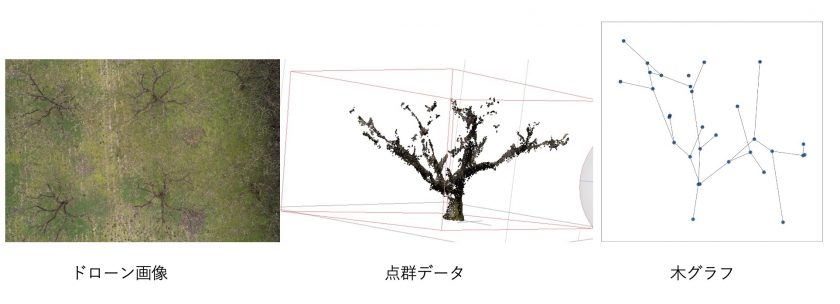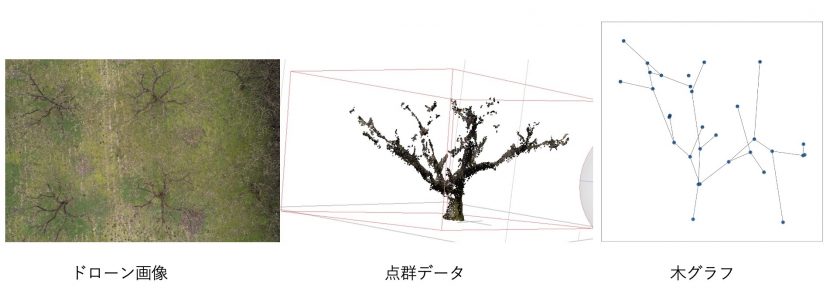
ウメの収量予測は重要な課題ですが,従来農業従事者の経験に基づいて行われてきたため,収量予測の精度に限界が生じています.また,農業従事者がそれぞれの樹を確認することは負担になります.そこで本研究では,ウメの樹のドローン画像を用いての点群処理と樹の骨格化を通して得た,樹情報とウメ収量との相関を評価し,収量予測の可能性を調査します.
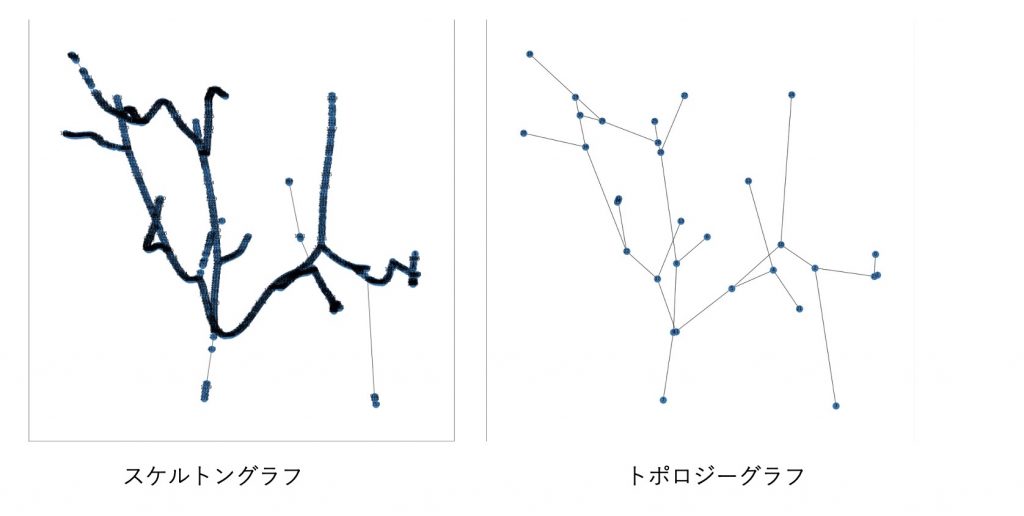
実験では,ドローン画像をもとに作成した点群データからウメの樹のスケルトングラフとトポロジーグラフを作成し,これらの木グラフからウメの樹の樹情報を取得し,ウメ収量との重回帰分析を行い,相関を評価しました.
実験では,ドローン画像をもとに作成した点群データからウメの樹のスケルトングラフとトポロジーグラフを作成し,これらの木グラフからウメの樹の樹情報を取得し,ウメ収量との重回帰分析を行い,相関を評価しました.

結果として,合計長さと収量との相関が最もよく,点群処理と骨格化を用いた計算による枝の合計長さを基にウメ収量を予測できる可能性が確認できました.
今後は,ドローンの撮影を画像ではなく動画で行うことで入力枚数を増やし,点群作成の精度を向上させます.