近年,日本では少子化や高齢化が進行する中で,労働力不足が深刻な社会問題となっています.このような背景の中,解決策として,遠隔操作技術が注目されています.遠隔操作技術の活用により,熟練した技術者による遠隔地からの作業や新たな雇用の機会の提供が可能となります.しかし、遠隔操作技術には触覚の欠如と直感的操作の課題があります.
こうした課題に対処するため,身体部位に触覚機を装着し,振動や電気などのフィードバックを得る研究やボタンやレバーがありますが,これらのフィードバックはオペレーターに直接的な身体的刺激を与えることで不快感や疲労を引き起こす可能性があり,個人差や操作環境による影響を受けやすいという問題があります.
また,ボタンやレバー,画面を用いるインターフェースでは,人間の直感的な操作が難しく,タスクの複雑性が増すにつれて、操作の効率性と正確性が低下する可能性があり,複雑な作業への対応が制限されてしまいます.
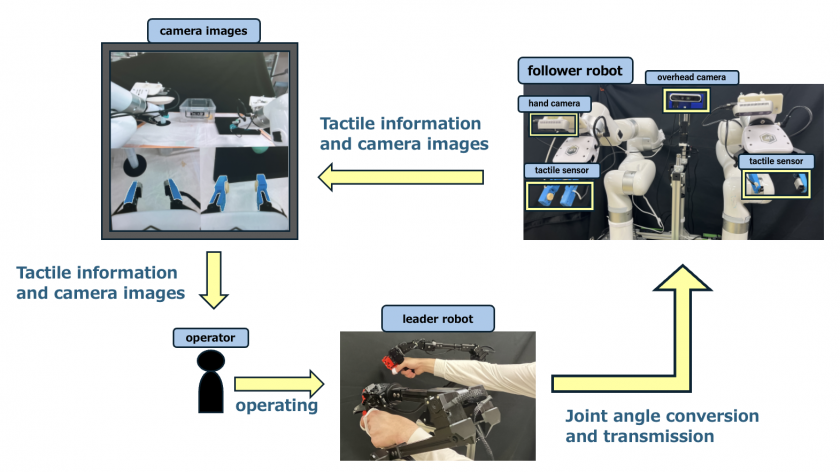
本研究では,触覚フィードバックとして,触覚情報を視覚的フィードバックとして提示するビジュアルハプティクスを採用し,操作システムとしてリーダーフォロワー型の双腕ロボットを用いた遠隔操作システムを構築しました.リーダーフォロワーシステムは,リーダーロボットの動きに追従するフォロワーロボットを遠隔地に配置したシステムで直感的動作を可能にする制御方式です.
比較実験ではビジュアルハプティクスが実装された双腕リーダーフォロワーシステムではビジュアルハプティクス有無の比較では有意な差は見られませんでした.これはビジュアルハプティクスを評価する以前にリーダー機の操作性に問題があると考えます.今後は操作環境の改善と奥行きの知覚をアシスト作業によって改善していくことが課題です.
