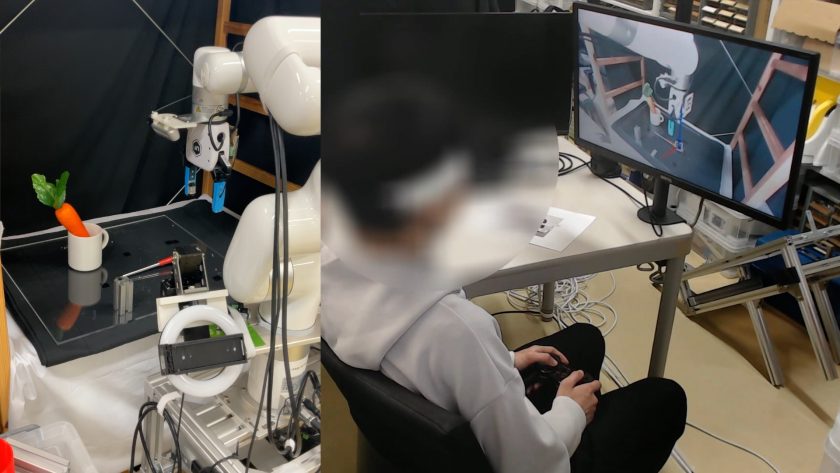
ロボットの遠隔操作は限られたフィードバックによる操作難易度の高さが課題としてあります.この課題の解決のため力覚情報や触覚情報をフィードバックするシステムや操作をアシストするシステムなどが提案されています.本研究では,単一の視点をディスプレイに表示するロボットアームの遠隔操作における把持タスクをより簡単にするために操作補正と目標位置までの到達に必要な情報を表示するアシスト制御を提案しました.
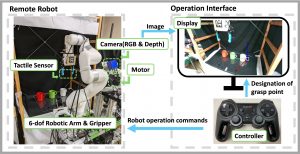
提案手法では物体の種類に制限を設けない,操作インターフェイスに高価な計測機器を使用しないことを制約としました.また,提案手法ではベジェ曲線に基づく操作補正を行うことでより物体に接近しやすく,矢印を用いて目標位置までの距離と方向を表示することで視覚的にも操作をアシストします.(Fig. 1).

実験では操作補正の有無と表示機能の有無の4パターンの操作手法を用いて3種類の物体を把持するタスクを行いました.結果として,アンケート調査により提案手法の有効性が示唆されました(Fig. 2).
今後は,設置タスクへの対応や隠れた物体に対応するなどより様々な操作に対応したアシスト制御の開発を目指します.