近年,少子高齢化や人口減少に伴う労働力不足が社会問題となっており,解決策として代替労働力や生活支援を目的としたヒューマノイドロボットの開発が進められています.ヒューマノイドロボットが自然で効率的な家事動作を実現するためには,視覚情報と動作の関係を正確に把握し,適切な行動設計をする必要があります.そこで本研究では,家事動作である棚だし動作について,箱の中のおもりの重さを変化させた際の腰を使用する速さとCoPが移動する速さの関係性について解析することを目的とします.

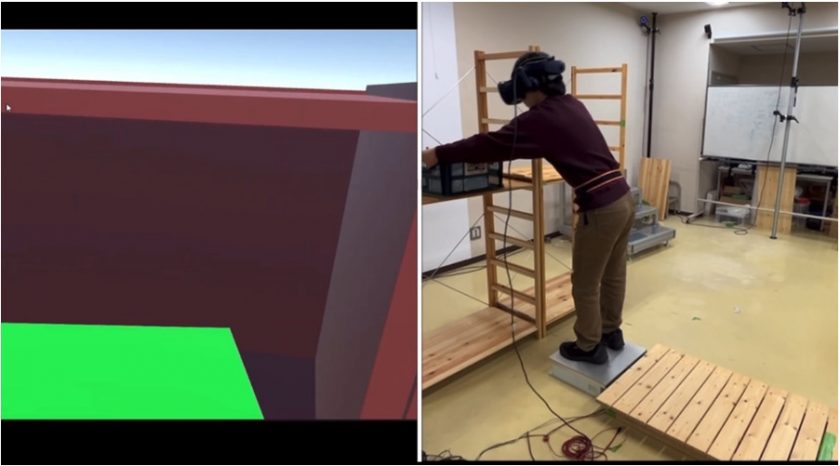
実験では,横に並ぶ2つの棚について,左の棚から右の棚に箱を持ち上げて移動する際の箱を持つ動作と箱を置く動作に着目して解析を行いました.仮想環境ライブラリにUnity3Dを使用し,HMDにHTC Vive Pro2 Eyeを使用しています.動作計測のためにフォースプレート,光学式モーションキャプチャシステム,Vive Trackerを使用して計測を行いました.
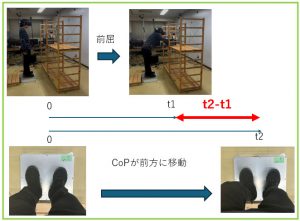
箱を持ち上げる動作をするとき,箱の中のおもりがないときと比較して,おもり10kg のときは腰を前屈させてからCoPが最も前方に移動するまでの時間を要しました.したがっ て,重い荷物を持ち上げる際,腰を最も前屈させる準備姿勢になってから力を発揮するまでの準備時間が必要だと考えられます.
今後は,おもりの重さによって有意差が出た家事動作の視覚情報と動作の関係性を解析することを目標とします.