疾患,特に腫瘍に対して確定診断をつける際,病理診断は必須のプロセスである.病理診断は単独もしくは複数の病理医の観察のもと行われる.本研究で取り扱う精巣胚細胞腫瘍の診断においては一般的に,診断時には各組織型ごとの占拠割合の記載が必要となるが,症例数が少ない組織型や複数の組織型の混在等があるため,割合を求めるための作業負荷が大きい.深層学習を活用し,診断前に各組織型ごとの割合が自動算出できれば,診断にかかる人的コストを大幅に削減できると考える.
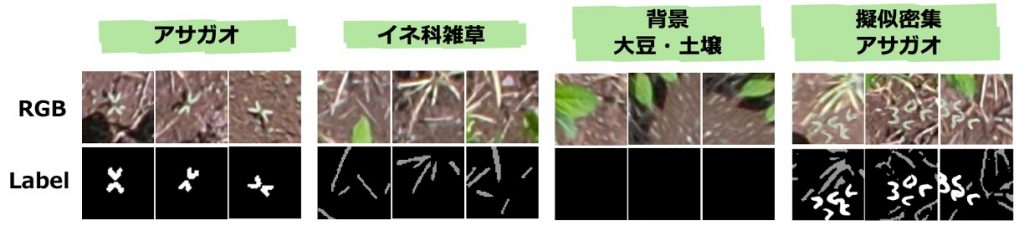
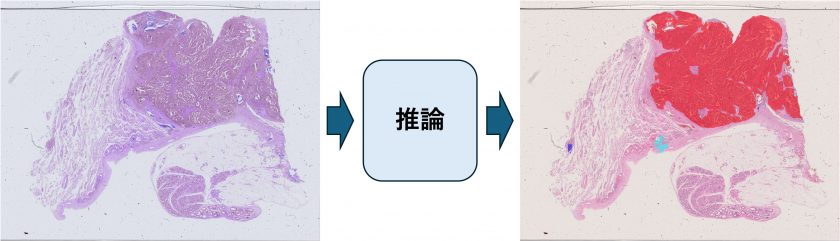
本研究では,深層学習アルゴリズムであるYOLOv8-segを用いて,組織切片画像(Whole Slide Image: WSI)から精巣腫瘍の組織型を学習させ,推論を行う.組織型ごとにアノテーションを行った5枚のWSIを用いた.含まれる組織型は,セミノーマ,胎児性腫瘍,絨毛癌,卵黄嚢腫瘍,奇形腫である.各画像を細胞が視認できるレベルまで細かく分割し,データセット数700枚程度で追加学習を行った.
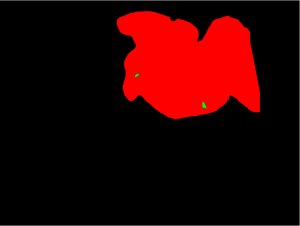
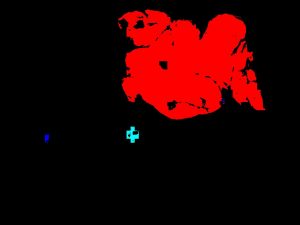
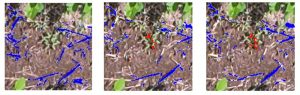
正常領域を含めた画像全体の正解率は1枚目(Fig. 2)97.47%,2枚目86.51%,3枚目60.45%,4枚目89.88%,5枚目96.49%となった.
用意した画像は,主に胎児性腫瘍の領域が大きく,胎児性腫瘍以外の4種類の領域は微小領域であったため,正解率への影響は小さい.そのため,今回の正解率の高さは,胎児性腫瘍の領域の検出精度の高さと言え,最も卵黄嚢腫瘍と奇形腫の領域が大きい3枚目の画像では学習が不十分のため,正解率が低い.
今後の展望として,追加学習やモデルの改良等を通して,胎児性腫瘍の領域以外の精度を上げたいと考える.