ヒューマノイドロボットは人間と類似した構造を持っており,冗長性があります.人間は冗長性を活用することで,衝突回避や操作性の向上などを実現しているため,動作の特徴をヒューマノイドに応用することが期待されていますが,人間の動作の特徴はあまり解明されていません.そこで本研究では,狭い空間への収納動作に着目し,人間の冗長性を活用した動作の解析を行っています.
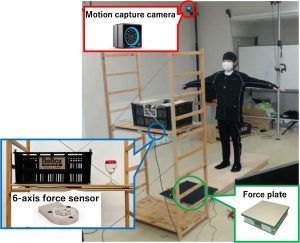
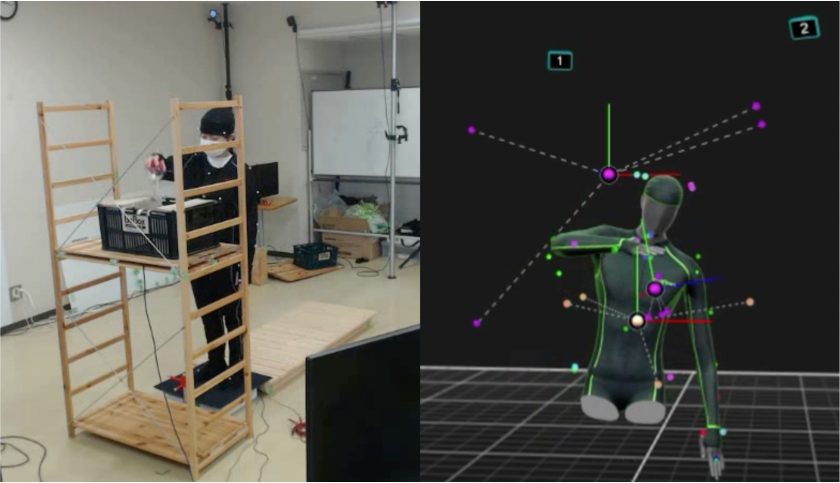
実験では,使用可能な空間を制限した箱にグラスを収納する動作を対象としました.全身動作の計測には光学式モーションキャプチャを使用し,物体操作のタイミング取得に6軸力覚センサ,バランスの取得にはフォースプレートを用いました(Fig. 1).

モーションキャプチャデータから胴体の傾きや捻り,肘や肩の関節角度,肘の高さを解析した結果,狭い空間にものを収納する際は肘を高く持ち上げて収納し,その際に胴体の側屈が利用されていることが示唆されました(Fig. 2).
今後は,階層的クラスタリングを用いて個人差を考慮した解析を行っていきます.