
ブルドーザーなどの建設機械に使用される「高圧配管用継手」(Figure 1)には制作時に高確率で切削バリ(削り残し)が発生します.このバリを残したままにしてしまうと建設機械の誤動作の原因となってしまいます.

現在は,Figure 2のように,熟練工が全ての継手のバリ検査を行なっており,作業者に大きな負担がかかっています.このことから,バリ検査の自動化が必要となっています.
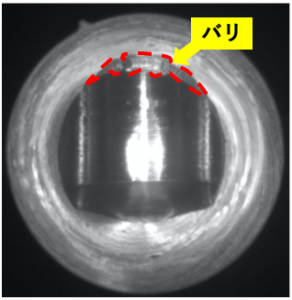
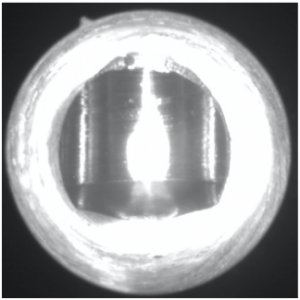
バリ検査の自動化のためには,継手内の撮影も自動化する必要があり,その際に,継手への照明の光の入れ方が重要となります.例として,上のFigure 3-1は光の入れ方が適切な時,Figure 3-2は光の入れ方が不適切な時の継手内画像になります.見て分かる通り,右の画像ではバリが認識しにくくなっています.
このことから,継手に対する適切な照明の位置姿勢を,熟練工のバリ検出動作をロボットアームで模倣することで探索する研究を行なっています.
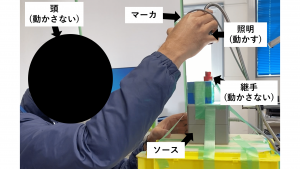
熟練工のバリ検出動作をFigure 4のようにモーションキャプチャシステムを使用して行い,熟練工がバリを見ているときの照明の位置姿勢として,照明の位置姿勢が停止している点を抽出しました.
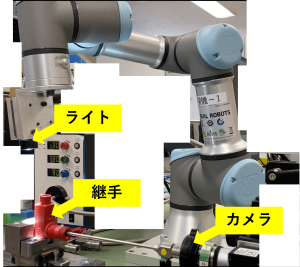
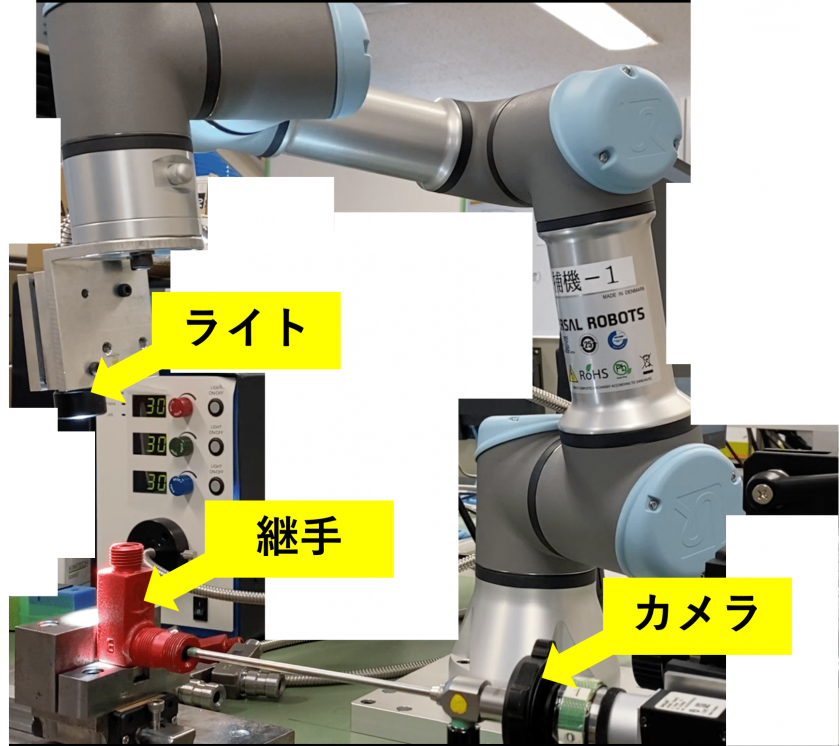
Figure 5のように実際に照明を装着したロボットアームを,抽出した位置姿勢へ移動させて継手内の撮影を行いました.
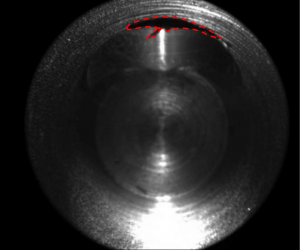
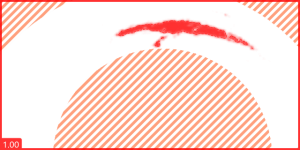
Figure 6-1のような撮影された画像をバリ検出をした結果,Figure 6-2で分かるようにバリの形を認識しています.この研究の結果,先行研究と比べて,バリを見逃してしまう確率を減らすことができました.
現在は,より検出精度の高い照明の位置姿勢を機械学習によって探索するシステムを作成しています.
Publication
- 高圧配管用継手のバリ検査時の熟練工の動作模倣,吉田悠大,高橋泰岳,築地原里樹,日本知能情報ファジィ学会 合同シンポジウム2020 第29回 北信越支部シンポジウム & 第29回 人間共生システム研究会 講演論文集,pp. 1-2,2020.
- 熟練工の動作模倣による高圧配管用継手内部のバリ検査,吉田悠大,高橋泰岳,築地原里樹,ROBOMECH2021, 2P3-A07, 2021.