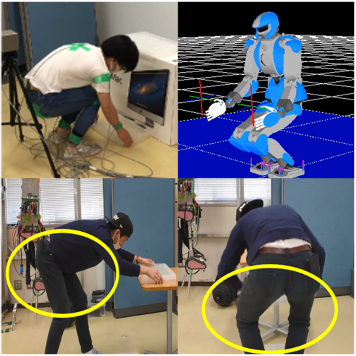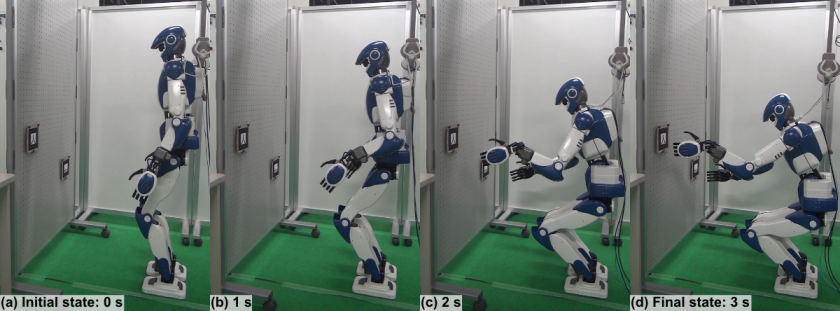
ヒューマノイドロボットの全身動作生成に計算時間がかかる問題に対し,事前データから目標の胴体姿勢を推定し,四肢の動作生成計算を軽量化することで,実時間化を狙う.実験では,等身大ヒューマノイドロボットのHRP-4と人間の生活空間を模擬した棚を設置して,合計3秒で屈みながら目標を到達できた.
Publication
- Yuya Hakamata, Satoki Tsuichihara, Gustavo Alfonso Garcia Ricardez, Jun Takamatsu, and Tsukasa Ogasawara,
Pushing and pulling motion generation for humanoid robots using whole body momentum control based on analytical inverse kinematics,
Advanced Robotics, Vol. 34, No. 21-22, pp. 1442-1454, 2020. - Satoki Tsuichihara, Yuya Hakamata, Gustavo Alfonso Garcia Ricardez, Jun Takamatsu, and Tsukasa Ogasawara,
Real-time whole-body motion generation using torso posture regression and center of mass,
ROBOMECH Journal, Vol. 5, No. 1, pp. 1-13, 2018.